Уравнивание приращений координат
_______Уравниванием называется совокупность математических операций, выполняемых для получения вероятнейшего значения геодезических координат точек земной поверхности и для оценки точности результатов измерений.
_______
Уравнивание проводится для устранения невязок, обусловленных наличием ошибок в избыточно измеренных величинах, и для определения вероятнейших значений искомых неизвестных или их значений, близких к вероятнейшим. В процессе уравнвиания это достигается путём определения поправок к измеренным величинам (углам, направлениям, длинам линий или превышениям).
7.1. Вычисление координат точек теодолитного хода
 |
_______
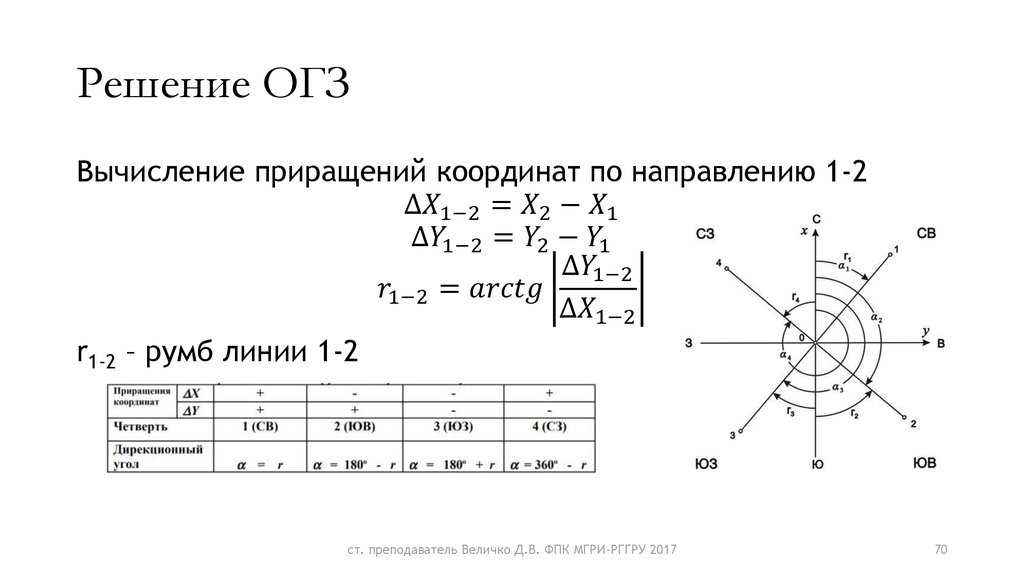
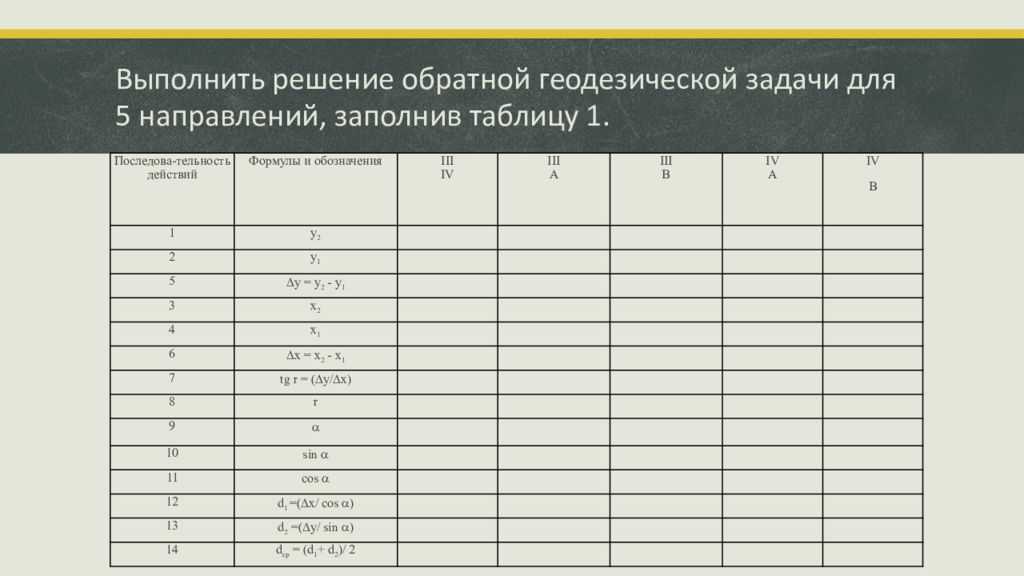
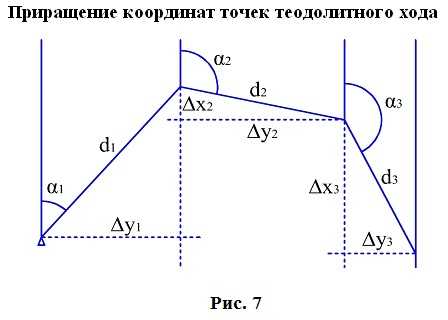
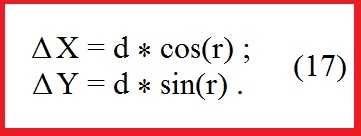
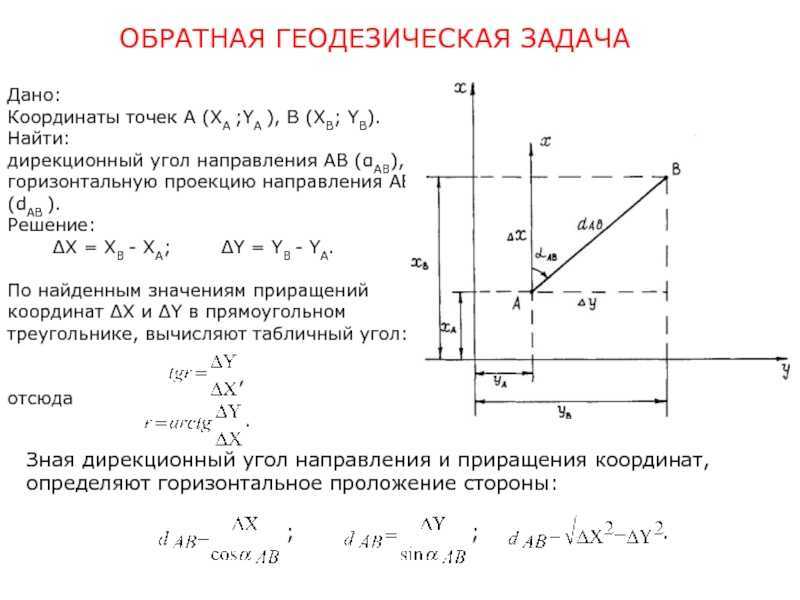
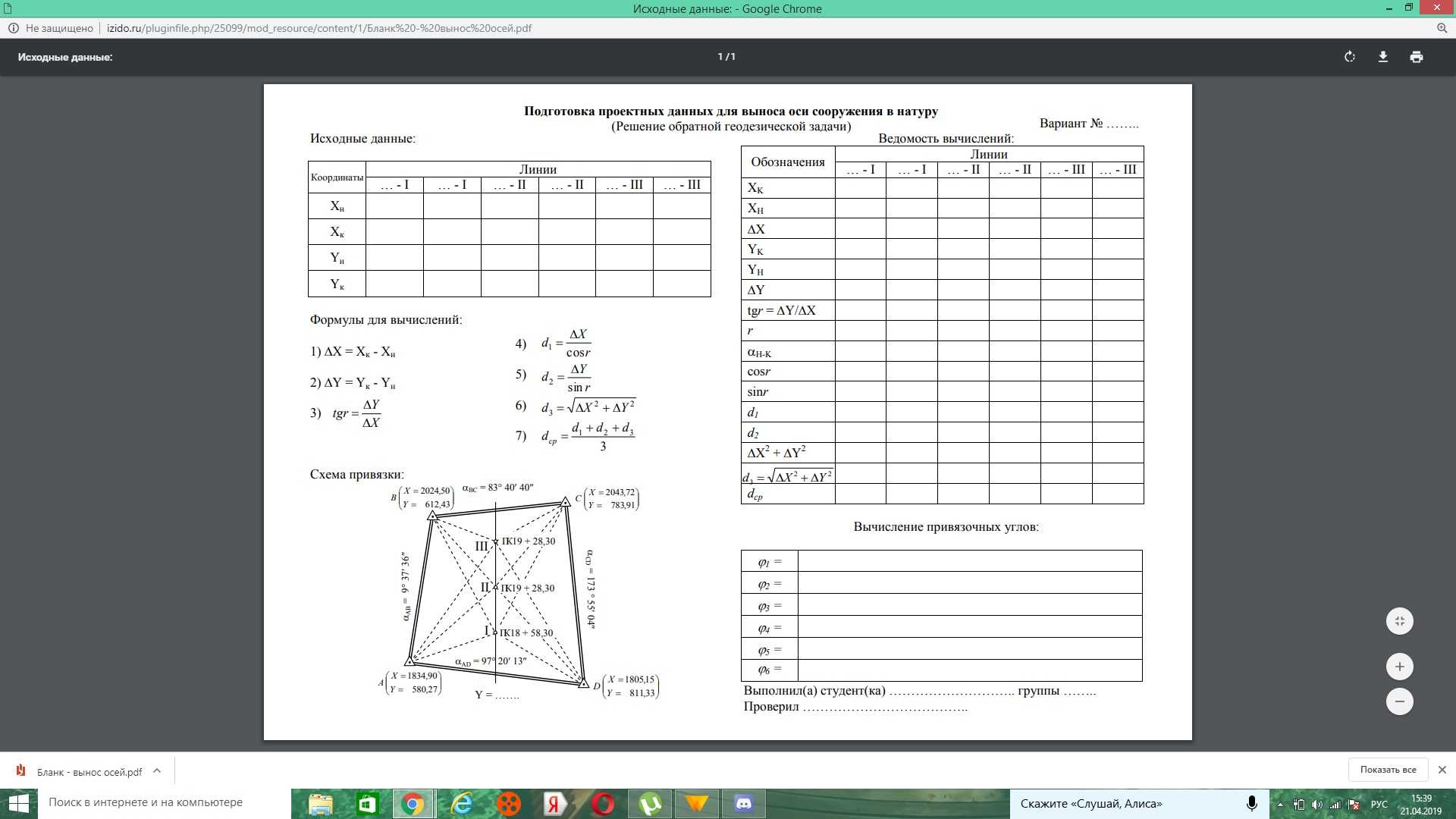
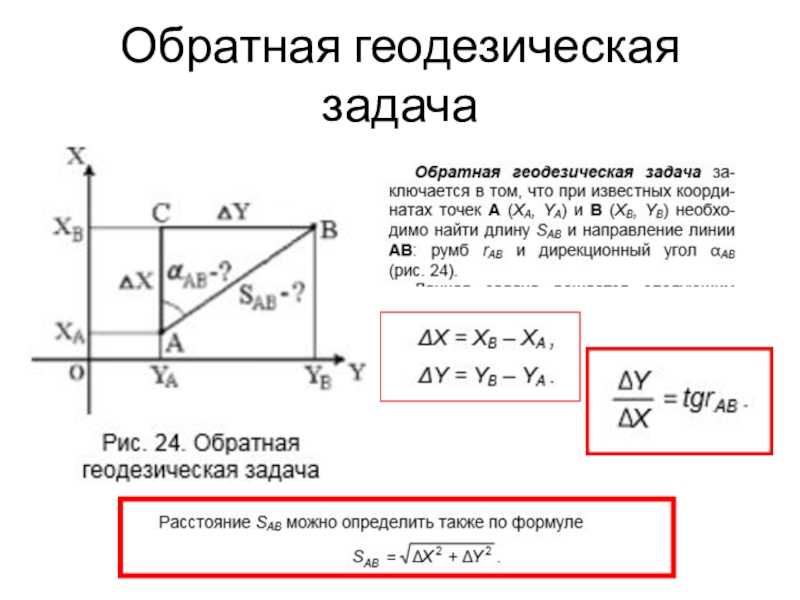
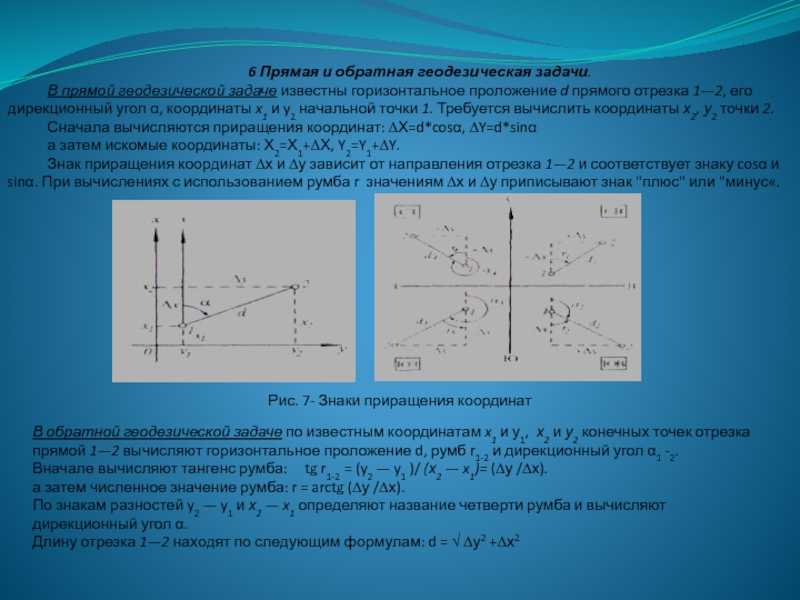
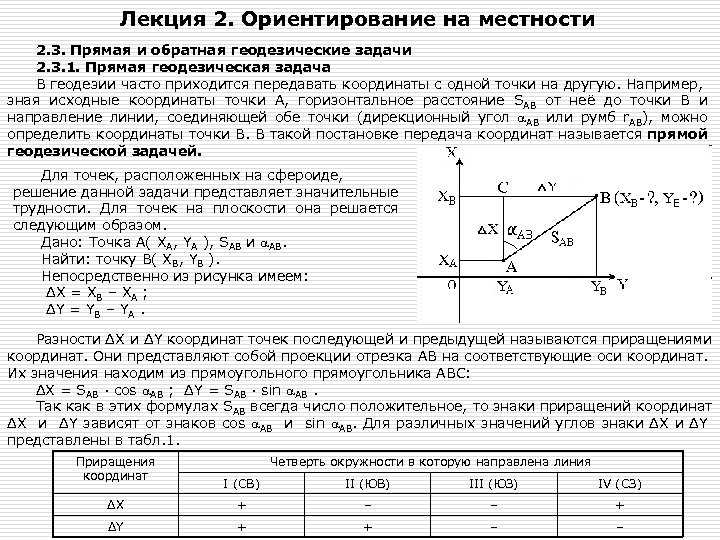
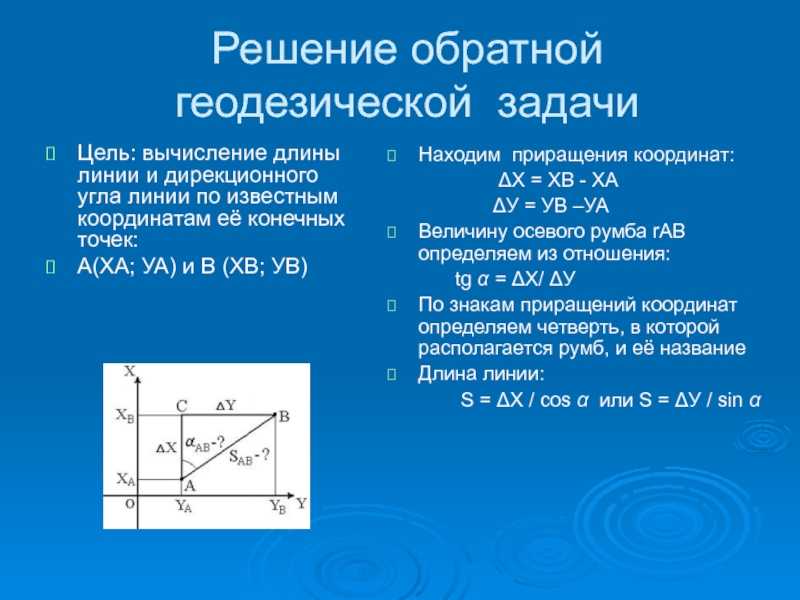
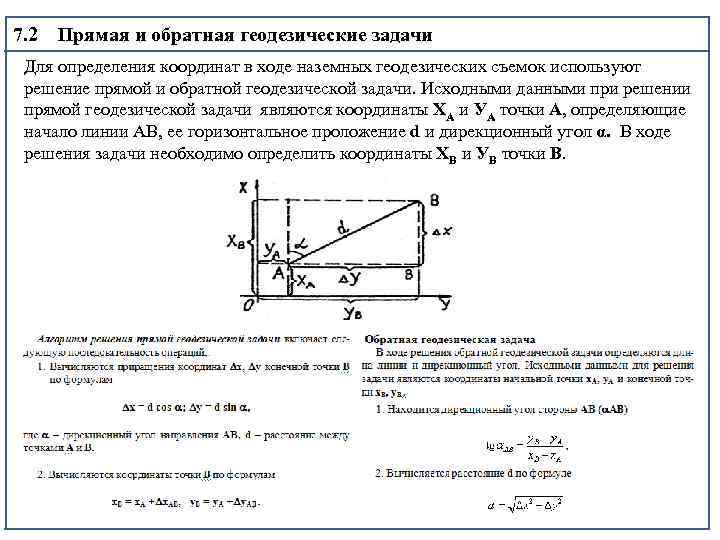
Из решения прямой геодезической задачи по известным длинам сторон и румбам вычисляются приращения координат для каждой стороны хода по формулам:
 |
_______
Далее вычисляются невязки в приращениях координат замкнутого хода.
7.2. Вычисление невязок в приращениях координат замкнутого хода
_______
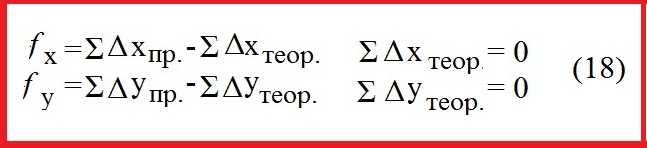
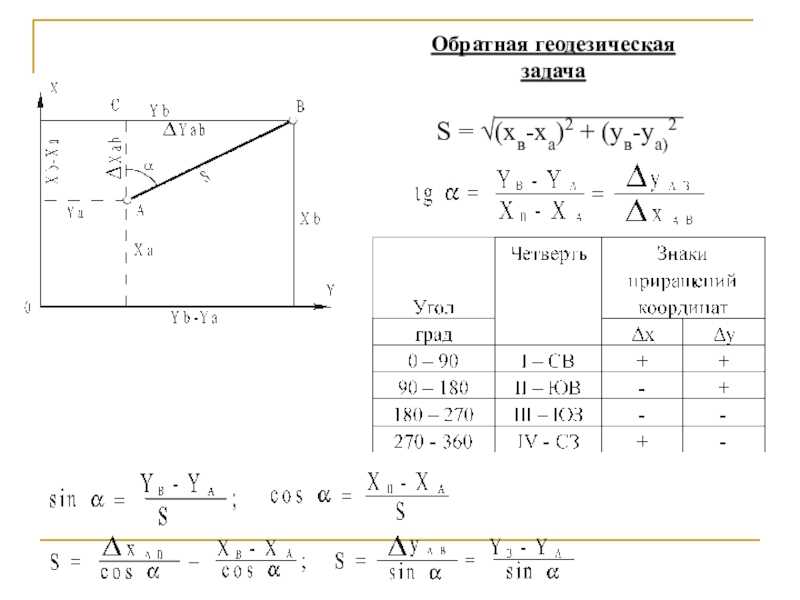
Из геометрии известно, что сумма проекций сторон многоугольника на любую ось равна нулю, следовательно:
 |
_______
Под влиянием ошибок измерений замкнутый полигон будет разомкнутым на величину fр – абсолютная невязка в периметре полигона.
 |
 |
_______
Если полученная невязка недопустима, то необходимо произвести повторное измерение длин линий.
_______
Если невязки допустимы, то они распределяются на приращения координат пропорционально длинам сторон с противоположным знаком, то есть сумма исправленных приращений должна быть точно равна теоретической сумме – в данном случае равна нулю.
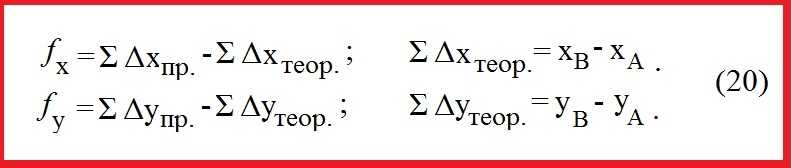
7.3. Вычисление невязок в приращениях координат разомкнутого теодолитного хода
_______
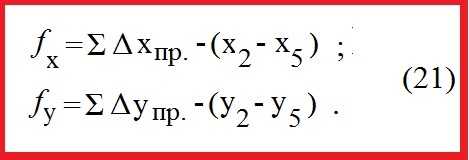
Определение допустимости невязок и их распределения производится так же, как для замкнутого теодолитного хода.
 |
 |
например
 |
 |
_______
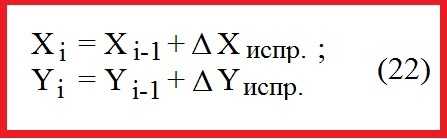
По исправленным значениям приращений координат вычисляются координаты всех точек хода по формулам:
 |
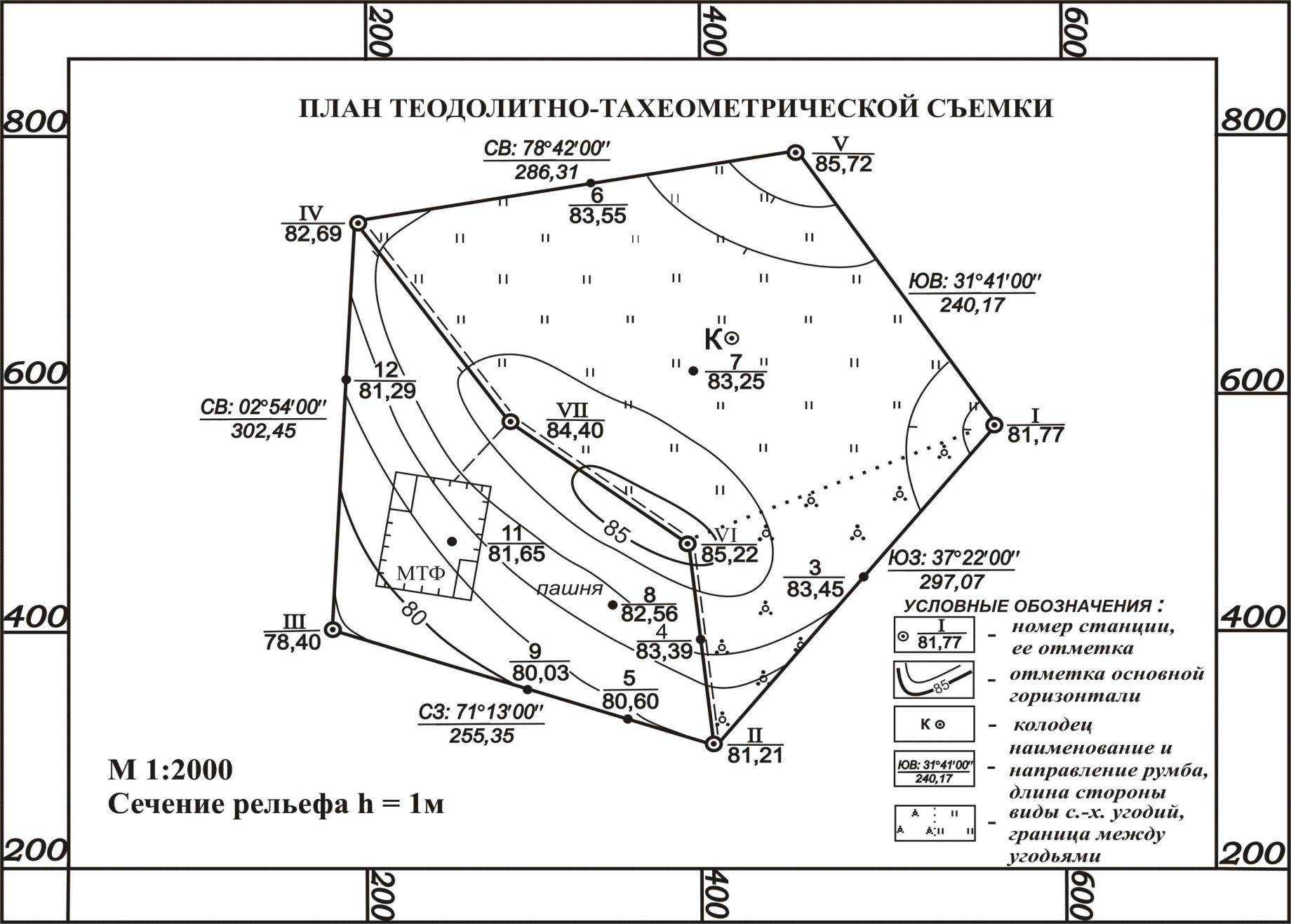
Построение плана
_______
Построение плана выполняются в следующей последовательности:1) построение координатной сетки,2) нанесение вершин теодолитного хода по координатам,3) нанесение на план контуров местности,4) оформление плана.
8.1. Построение координатной сетки
_______
Координатная сетка строится обычно со стороной 10х10 см.
Используется два способа:
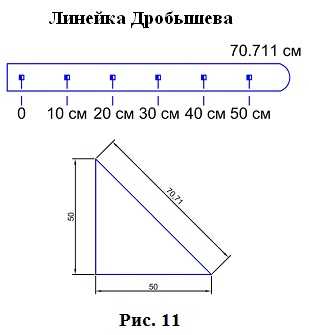
_______1) построение сетки с помощью линейки Дробышева:
 |
_______
Построение сетки основано на построении прямоугольного треугольника с катетами 50×50 см и гипотенузой 70,711 см;
2) построение сетки с помощью циркуля, измерителя и масштабной линейки:
 |
_______
Этот способ применяется при размере плана меньше, чем 50 см. Сетка контролируется путем сравнения длин сторон или диагоналей квадратов. Допустимое отклонение – 0,2 мм. Построенную сетку подписывают координатами так, чтобы участок поместился.




_______
Вершины теодолитного хода наносятся на план по координатам относительно сетки с помощью измерителя и поперечного масштаба.
_______
Контроль правильности построения точек выполняется по известным расстояниям между точками. Допустимое расхождение – 0,3 мм в масштабе плана.
_______
Например: 1:2000 – 0,6 м.
_______
Контуры местности наносятся на план в соответствии с абрисами.
_______
Оформление плана выполняется в строгом соответствии с условными знаками, установленными для данного масштаба.
Инструкция по прохождению теста
- Выберите один из вариантов в каждом из 10 вопросов;
- Нажмите на кнопку «Показать результат»;
- Скрипт не покажет результат, пока Вы не ответите на все вопросы;
- Загляните в окно рядом с номером задания. Если ответ правильный, то там (+). Если Вы ошиблись, там (-).
- За каждый правильный ответ начисляется 1 балл;
- Оценки: менее 5 баллов — НЕУДОВЛЕТВОРИТЕЛЬНО, от 5 но менее 7.5 — УДОВЛЕТВОРИТЕЛЬНО, 7.5 и менее 10 — ХОРОШО, 10 — ОТЛИЧНО;
- Чтобы сбросить результат тестирования, нажать кнопку «Сбросить ответы»;
[править] Пример программной реализации
Исходники вышеприведённых функций можно найти в архиве Sph.zip в файле sph.c. Кроме того, в файл sph.h включены следующие определения:
#define A_E 6371.0 // радиус Земли в километрах #define Degrees(x) (x * 57.29577951308232) // радианы -> градусы #define Radians(x) (x / 57.29577951308232) // градусы -> радианы
Теперь напишем программу, которая обращается к функции SphereInverse для решения обратной задачи:
#include <stdio.h>
#include <stdlib.h>
#include "sph.h"
int main(int argc, char *argv)
{
char buf1024;
double pt12, pt22;
double lat1, lon1, lat2, lon2, azi1, azi2, dist;
while (fgets(buf, 1024, stdin) != NULL) {
sscanf(buf, "%lf %lf %lf %lf", &lat1, &lon1, &lat2, &lon2);
pt1 = Radians(lat1);
pt11 = Radians(lon1);
pt2 = Radians(lat2);
pt21 = Radians(lon2);
SphereInverse(pt2, pt1, &azi2, &dist); // Решение обратной задачи
SphereInverse(pt1, pt2, &azi1, &dist); // Вычисление обратного азимута
printf("%f\t%f\t%.4f\n", Degrees(azi1), Degrees(azi2), dist * A_E);
}
return ;
}
В архиве Sph.zip этот код находится в файле inv.c. Создадим исполняемый модуль inv компилятором gcc:
$ gcc -o inv inv.c sph.c -lm
Впрочем, в архиве есть Makefile. Для MS Windows готовую программу inv.exe можно найти в архиве Sph-win32.zip.
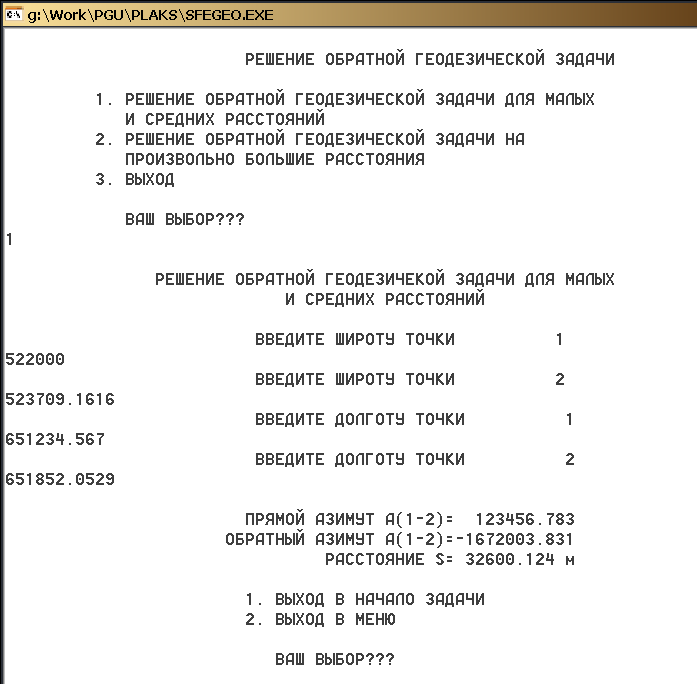
Программа читает данные из стандартного ввода консоли и отправляет результаты на стандартный вывод. Для чтения и записи файлов используются символы перенаправления потока «>» и «<» соответственно. Из каждой строки ввода программа считывает координаты двух точек φ₁, λ₁, φ₂, λ₂, которые должны быть в градусах, решает обратную задачу и записывает в строку вывода α₁, α₂, s (азимуты прямого и обратного направлений в градусах; расстояние между пунктами в километрах, а точнее, в единицах, определённых константой A_E).
Создадим файл inv.dat, содержащий одну строку данных:
30 0 52 54
После запуска программы
$ inv < inv.dat
получим α₁, α₂, s:
44.804060 262.415109 5001.1309
В архиве Sph-py.zip находятся скрипты на языке Питон. Выполнение скрипта в командной консоли:
$ python inv.py inv.dat
Примеры
Решение прямой геодезической задачи
Для решения прямой геодезической задачи, неоходимо создать объект класса .
var directEllipsoid = new DirectProblemService(new Ellipsoid()); var directSpheroid = new DirectProblemService(new Spheroid());
В качестве параметра в конструктор следует передать объект реализующий интерфейс , в котором задаются полярный и экваториальный радиус, а так же коэффициент полярного сжатия.
Для решения прямой задачи вызвать метод , в который передать в качестве параметров, начальную точку, азимут = направление и расстояние:
var point1 = new Point(15, 25, 53, CardinalLongitude.W, 28, 7, 38, CardinalLatitude.N); var azimuth = 21; var distance = 2000; var directAnswer = directEllipsoid.DirectProblem(point1, azimuth, distance);
Ответ содержит вторую точку ортодромии и обратный азимут .
Решение обратной геодезической задачи
Для решения обратной геодезической задачи, неоходимо создать объект класса .
var inverseEllipsoid = new InverseProblemService(new Ellipsoid()); var inverseSpheroid = new InverseProblemService(new Spheroid());
В качестве параметра в конструктор следует передать объект реализующий интерфейс , в котором задаются полярный и экваториальный радиус, а так же коэффициент полярного сжатия.
Для решения обратной задачи вызвать метод , в который передать в качестве параметров, две точки:
var point1 = new Point(15, 25, 53, CardinalLongitude.W, 28, 7, 38, CardinalLatitude.N); var point2 = new Point(59, 36, 30, CardinalLongitude.W, 13, 5, 46, CardinalLatitude.N); var inverseAnswer = inverseEllipsoid.OrthodromicDistance(point1, point2);
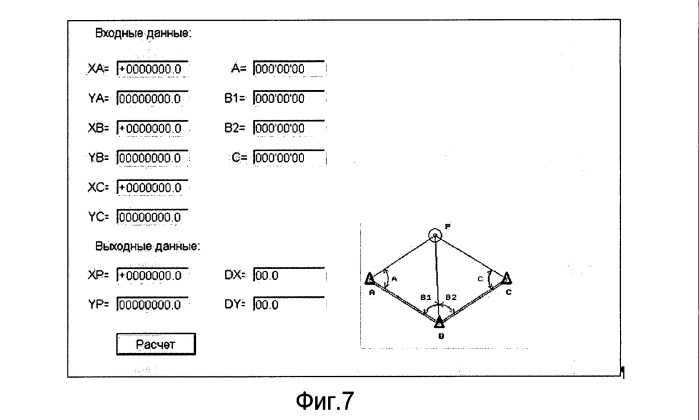
Ответ содержит прямой и обратный азимуты , , а также расстояние между точками .
Вычисление точки пересечения ортодромий
Для вычисления точки пересечения ортодромий, неоходимо создать объект класса .
var intersectEllipsoid = new IntersectService(new Ellipsoid()); var intersectSpheroid = new IntersectService(new Spheroid());
В качестве параметра в конструктор следует передать объект реализующий интерфейс , в котором задаются полярный и экваториальный радиус, а так же коэффициент полярного сжатия.
Для рассчёта вызвать метод , в который передать в качестве параметров, по две точки для каждой из двух ортодромий:
var point1 = new Point(22, 36, 30, CardinalLongitude.E, 13, 5, 46, CardinalLatitude.N); var point2 = new Point(27, 25, 53, CardinalLongitude.E, 15, 7, 38, CardinalLatitude.N); var point3 = new Point(20, 36, 30, CardinalLongitude.E, 17, 5, 46, CardinalLatitude.N); var point4 = new Point(26, 25, 53, CardinalLongitude.E, 13, 7, 38, CardinalLatitude.N); var intersectCoord = intersectEllipsoid.IntersectOrthodromic(point1, point2, point3, point4);
Ответом будет точка — объект класса , в котором определены долгота и широта, в десятичных градуса (,) или в радианах (,).
Вычисление широты по долготе или долготы по широте
Для рассчётов, неоходимо создать объект класса .
var intermediateEllipsoid = new IntermediatePointService(new Ellipsoid()); var ntermediateSpheroid = new IntermediatePointService(new Spheroid());
В качестве параметра в конструктор следует передать объект реализующий интерфейс , в котором задаются полярный и экваториальный радиус, а так же коэффициент полярного сжатия.
Для вычисления широты вызвать метод , в который передать значение долготы, для которого мы вычисляем широту, и две координаты характеризующие ортодромию.
var coord1 = new Point(10, 10); var coord2 = new Point(30, 50); var lat = intermediateEllipsoid.GetLatitude(20, coord1, coord2);
Для вычисления долготы вызвать метод , в который передать значение широты, для которого мы вычисляем долготу, и две координаты характеризующие ортодромию.
var coord1 = new Point(10, 10); var coord2 = new Point(30, 50); var lat = intermediateEllipsoid.GetLongitude(20, coord1, coord2);
В обоих случая ответом будет значение типа .
[править] Алгоритм
Существует великое множество подходов к решению поставленной задачи. Рассмотрим простой и надёжный векторный метод.



Последовательность решения:
- преобразовать углы (90° − σ) и (180° − α₁) в декартовы координаты,
- развернуть координатные оси вокруг оси Y на угол (φ₁ − 90°),
- развернуть координатные оси вокруг оси Z на угол −λ₁,
- преобразовать декартовы координаты в сферические.
Если третий пункт пропустить, на выходе вместо долготы λ₂ получится разность долгот (λ₂ − λ₁), что упростит алгоритм. Останется только прибавить долготу первого пункта. С другой строны, благодаря третьему пункту долгота λ₂ всегда будет в диапазоне .
Пример реализации алгоритма в виде функции языка Си:
/*
* Решение прямой геодезической задачи
*
* Аргументы исходные:
* pt1 - {широта, долгота} точки Q1
* azi - азимут начального направления
* dist - расстояние (сферическое)
*
* Аргументы определяемые:
* pt2 - {широта, долгота} точки Q2
*/
void SphereDirect(double pt1, double azi, double dist, double pt2)
{
double pt2, x3;
pt = M_PI_2 - dist;
pt1 = M_PI - azi;
SpherToCart(pt, x); // сферические -> декартовы
Rotate(x, pt1 - M_PI_2, 1); // первое вращение
Rotate(x, -pt11, 2); // второе вращение
CartToSpher(x, pt2); // декартовы -> сферические
return;
}
Следует заметить, что прямая и обратная задача математически идентичны, и алгоритмы их решения зеркально отражают друг друга.
Преобразование сферических координат в декартовы
В данном случае в качестве сферических координат φ, λ подставим углы (90° − σ), (180° − α₁).
Реализация на Си:
/*
* Преобразование сферических координат в вектор
*
* Аргументы исходные:
* y - {широта, долгота}
*
* Аргументы определяемые:
* x - вектор {x, y, z}
*/
void SpherToCart(double y, double x)
{
double p;
p = cos(y);
x2 = sin(y);
x1 = p * sin(y1);
x = p * cos(y1);
return;
}
Вращение вокруг оси
Представим оператор вращения вокруг оси X на угол θ в следующем виде:
Операторы вращения вокруг осей Y и Z получаются перестановкой символов.
Реализация вращения вокруг i-ой координатной оси на Си:
/*
* Вращение вокруг координатной оси
*
* Аргументы:
* x - входной/выходной 3-вектор
* a - угол вращения
* i - номер координатной оси (0..2)
*/
void Rotate(double x, double a, int i)
{
double c, s, xj;
int j, k;
j = (i + 1) % 3;
k = (i - 1) % 3;
c = cos(a);
s = sin(a);
xj = xj * c + xk * s;
xk = -xj * s + xk * c;
xj = xj;
return;
}
Преобразование декартовых координат в сферические
В данном случае в роли сферических координат φ, λ окажутся φ₂, λ₂.
Реализация на Си:
/*
* Преобразование вектора в сферические координаты
*
* Аргументы исходные:
* x - {x, y, z}
*
* Аргументы определяемые:
* y - {широта, долгота}
*
* Возвращает:
* длину вектора
*/
double CartToSpher(double x, double y)
{
double p;
p = hypot(x, x1);
y1 = atan2(x1, x);
y = atan2(x2, p);
return hypot(p, x2);
}
[править] Общие положения
В качестве модели Земли принимается сфера с радиусом R, равным среднему радиусу земного эллипсоида. Аналогом прямой линии на плоскости является геодезическая линия на поверхности. На сфере геодезическая линия — дуга большого круга.
Введём следующие обозначения:
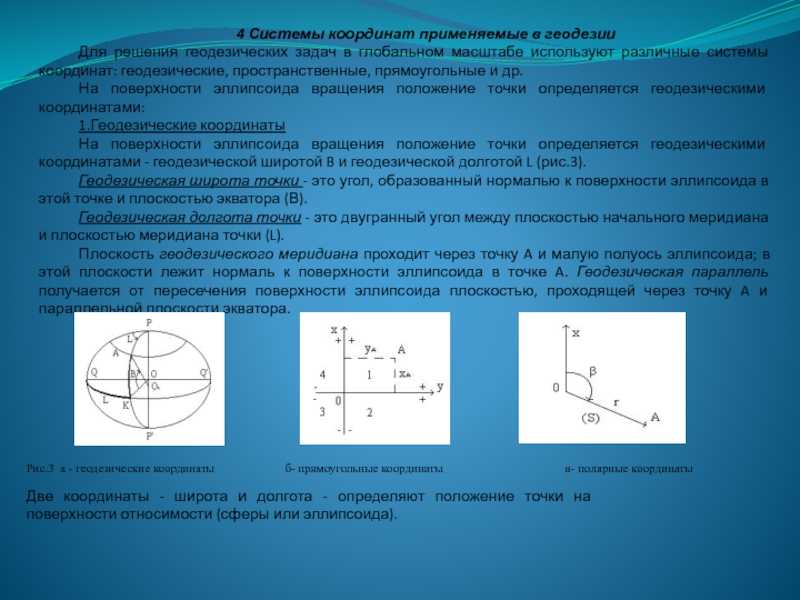
- φ — географическая широта,
- λ — географическая долгота,
- α — азимут дуги большого круга,
- σ — сферическое расстояние (длина дуги большого круга, выраженная в долях радиуса шара).
Линейное расстояние по дуге большого круга s связано со сферическим расстоянием σ формулой s = R σ.
Прямая и обратная геодезические задачи являются важными элементами более сложных геодезических задач.